1. 信号如何发送给目标进程
信号可以通过多种事件生成,例如:
- 用户按下特定的组合键(如 Ctrl+C 生成 SIGINT)。
- 硬件异常(如除零错误生成 SIGFPE)。
- 进程调用
kill()系统调用发送信号。 - 定时器到期(如 SIGALRM)。
信号传递给进程的过程如下:
- 当信号生成后,内核会将信号记录在目标进程的信号位图中,对应下面的结构
#[derive(Debug, Default)]
pub struct SigPending {
signal: SigSet,
queue: SigQueue,
}
- 然后,内核会在适当的时机调用
signal_pending()来处理挂起的信号。这个时机通常是目标进程从内核态返回到用户态时。
2. 信号的处理方法
- 如果进程为该信号设置了信号处理函数(signal handler),内核会调用该处理函数。
- 如果进程没有为该信号设置信号处理函数,内核会执行默认的信号处理动作(如终止进程、忽略信号等)。
3. PR889修复管道Bug的原因
目前尚未实现系统调用重启机制,如果系统调用返回一个 ERESTARTSYS 错误,会导致系统调用无法完成,使得进程状态异常,进程可能会因为资源耗尽或其他原因而被终止。上述 PR 将返回的 ERESTARTSYS 错误直接转换为 EINTR,明确用户态程序需要重新执行系统调用以解决错误。
上面说的是针对vfs的暂时的处理方法
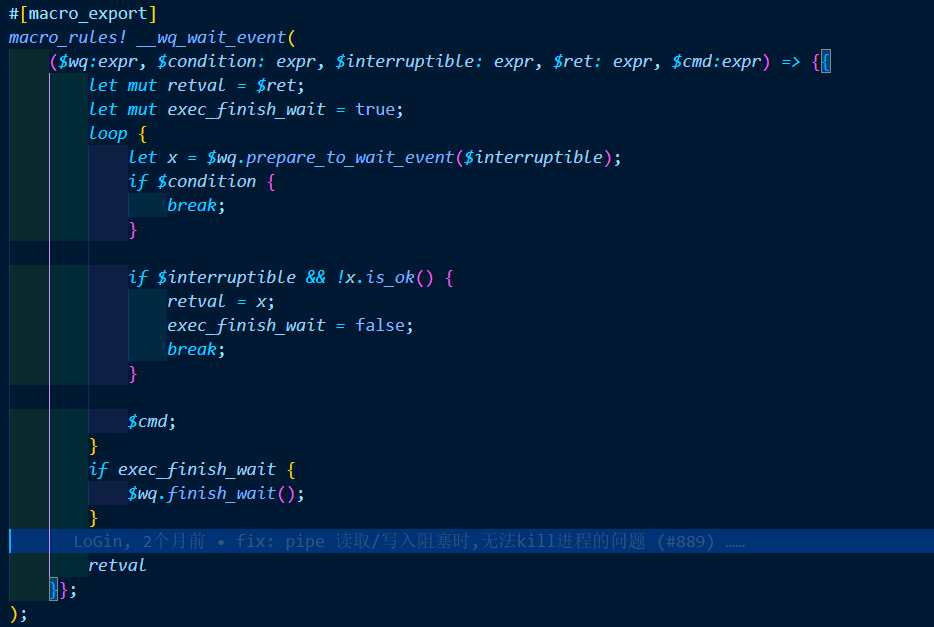
而对于pr中修复的pipe文件的问题,则是通过查看pipe_inode的情况来检查是否可读或可写,如果不可读不可写则会调用 wq_wait_event_interruptible! 宏来等待,使进程等待队列中睡眠,直到等待条件达成才会重新唤醒该进程,使进程重新进入执行状态,并且由于这个过程可以中断,仍可以kill进程
这个时候如果kill进程的话则会返回结果Err(SystemError::ERESTARTSYS),但是未实现系统调用重启机制,则仍是交给用户态程序处理
4. 如何复现 read、write 的问题
以下代码模拟了 read 操作,展示了如何复现问题:
use libc::{fcntl, F_SETFL};
use nix::sys::signal::{kill, Signal};
use nix::unistd::Pid;
use std::fs::{remove_file, File};
use std::io::{Read, Result, Write};
use std::os::unix::io::{AsRawFd, FromRawFd};
use std::sync::{Arc, Mutex};
use std::thread;
use std::time::Duration;
fn main() -> Result<()> {
// Create and write to a large file
let filename = "large_file.txt";
{
let mut file = File::create(filename)?;
for _ in 0..10_000 {
writeln!(file, "This is a line of text.")?;
}
}
// Open the file for reading
let mut file = File::open(filename)?;
let fd = file.as_raw_fd();
// Ensure the read operation is blocking
unsafe {
fcntl(fd, F_SETFL, 0); // Set to blocking mode
}
// Used to store the read byte data
let buffer = Arc::new(Mutex::new(vec![0u8; 1024])); // Use a larger buffer
let buffer_clone = Arc::clone(&buffer);
// Thread 1: Simulate a blocking read operation
let handle = thread::spawn(move || {
let mut file = unsafe { File::from_raw_fd(fd) }; // Create file from raw file descriptor
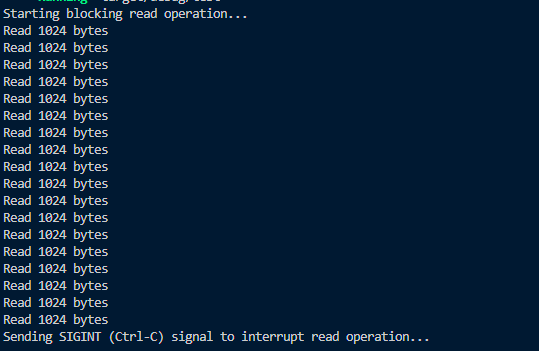
println!("Starting blocking read operation...");
loop {
let mut buffer_lock = buffer_clone.lock().unwrap();
match file.read(&mut *buffer_lock) {
Ok(0) => {
println!("No more data to read, exiting read");
break;
}
Ok(n) => {
// Output the number of bytes read, occupying the entire line
//if n != 1024 {
let output = format!("Read {} bytes", n);
println!("{:<width$}", output, width = 80); // Adjust width as needed
//}
}
Err(e) => {
eprintln!("Read failed: {:?}", e);
break;
}
}
}
});
// Thread 2: Delay sending SIGINT (Ctrl-C) signal to interrupt the blocking `read`
thread::sleep(Duration::new(0, 5_0000));
println!("Sending SIGINT (Ctrl-C) signal to interrupt read operation...");
let pid = Pid::this();
kill(pid, Signal::SIGINT).expect("Failed to send signal");
handle.join().expect("Error in read thread");
// Delete the temporary file
remove_file(filename).expect("Failed to delete file");
Ok(())
}